

レゴ 31164「うちゅうロボット」を実際に組み立てながら、構造やギミックを記録したレビュー記事です。
第1部では、脚部のキャタピラ構造から胴体のライトブロック、頭部の表情パーツまで、完成に至る全工程を写真付きで丁寧に解説します。
シンプルながら無駄のない設計や、発光ギミックによる演出など、本セットの魅力をじっくり確認できる内容になっています。
⚓️ 組立レビュー|はじめに
🌌 星暦31164年 ―― 航海記録:第1931航路・第4寄港地
観測対象ユニットの解析工程を開始。
今回の航路で最初に確認された、小型観測ユニット。
キャタピラ式の脚部。
中央コアを内包した胴体。
細身のアームと、大型センサーを備えた頭部。
構造だけ見れば、かなり簡素。
けれど――妙に完成度が高い。
特に内部コア周辺。
限られたサイズの中で、構造とギミックがきれいに整理されている。
……こういう機体って、静かな宙域ほど印象に残るのよね。
第一印象は“小型作業機”って感じかしら。
でも、妙に視線を感じるのよね
たしかに目です!
この大型センサー、かなり“見てる感”があります!
“見てる感”ってなによ、それ
なんというか……
『じーっ』って感じです!
……まあ、わからなくもないわ
しかもキャタピラ付きですよ!
ボク、こういう“重機っぽいロボ”好きなんです!
はいはい。
じゃあ今回は、その“好きな重機っぽいロボ”をしっかり観測していきましょうか
🔗 航路案内
・📜 総合案内(まとめ記事)はこちら
・🧱 組立レビュー 第2部|組立の記録を見る
・🧱 組立レビュー 第3部|組立の記録を見る
🧱 造営記録(組立)
🧩 第1章|脚部
――脚部ユニット、構築開始。
まずは移動機構から解析していく。
袋1パーツ
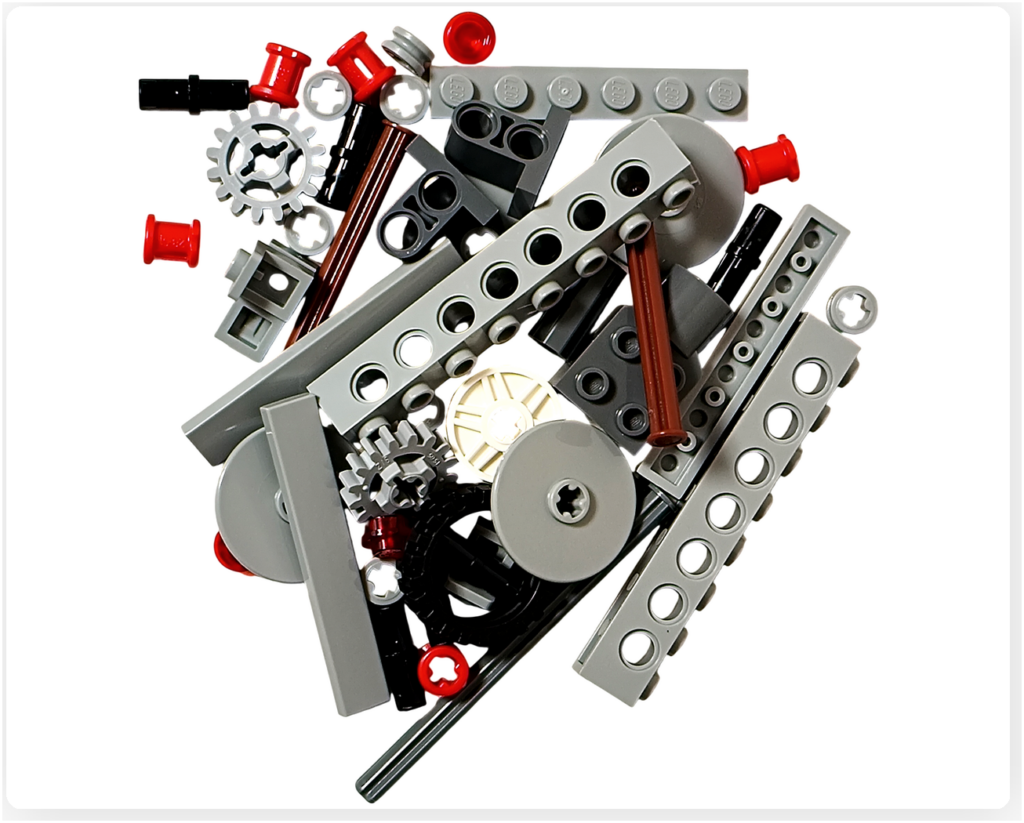
フレーム基部に使用されるパーツが中心で、初期構造の組み上げに必要な要素が揃っている。
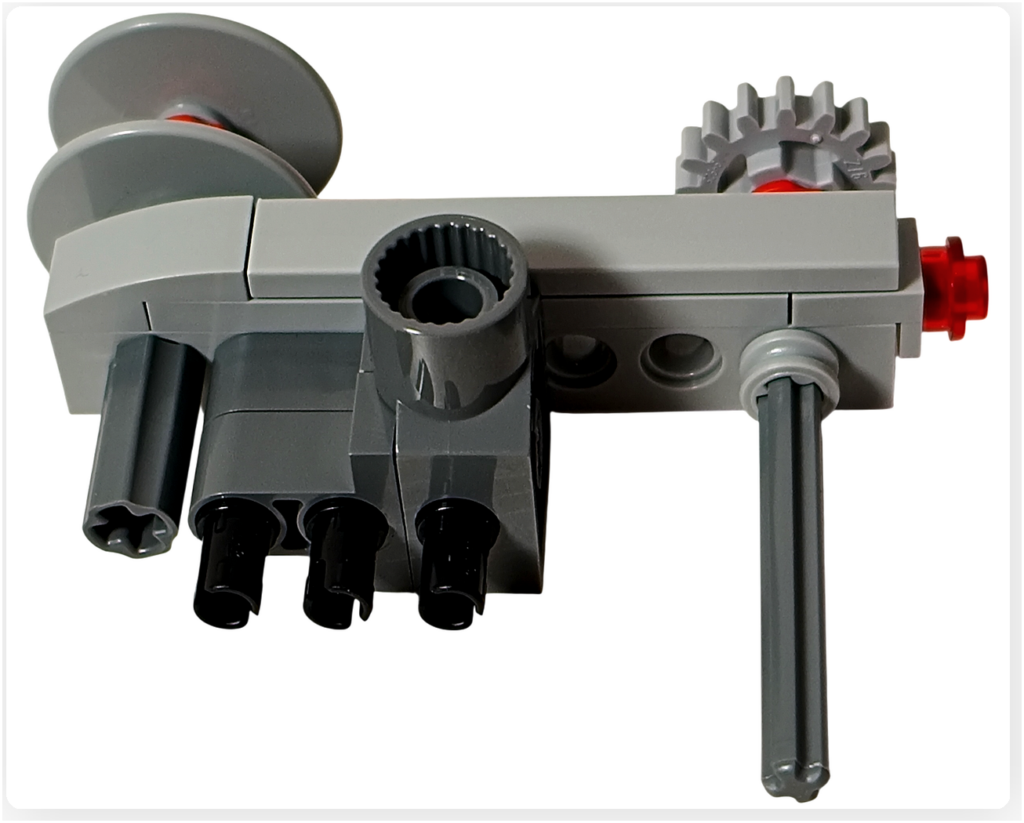
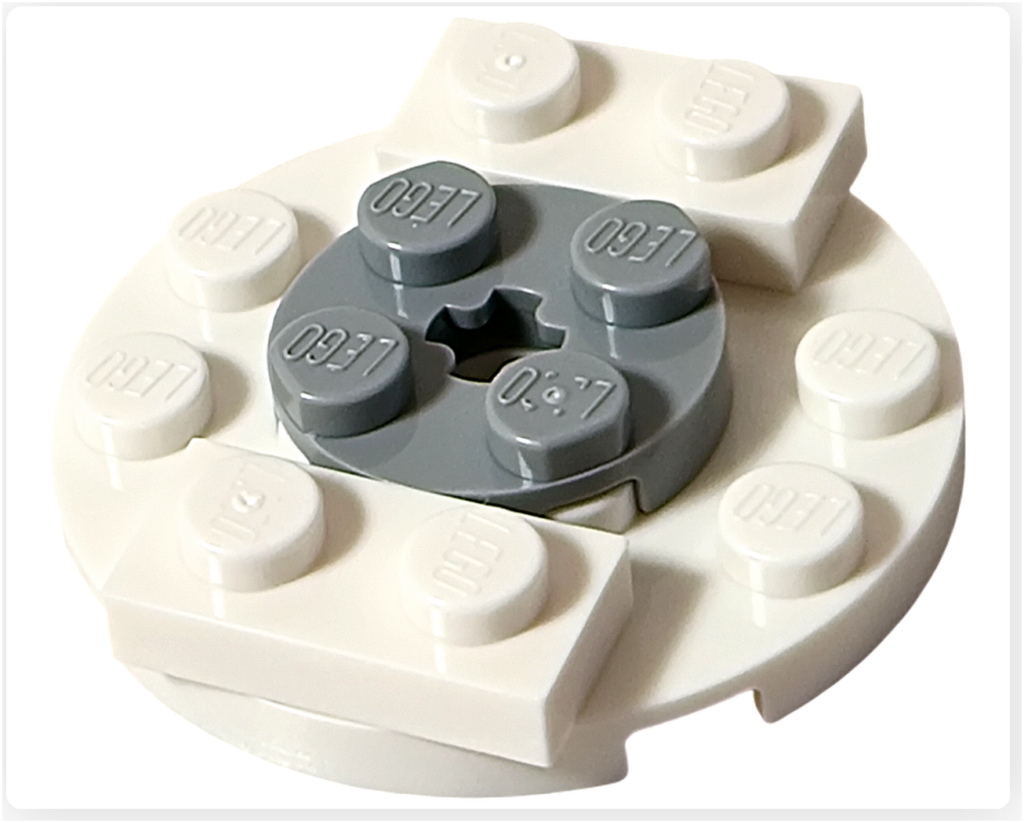
フレーム構築|基礎構造
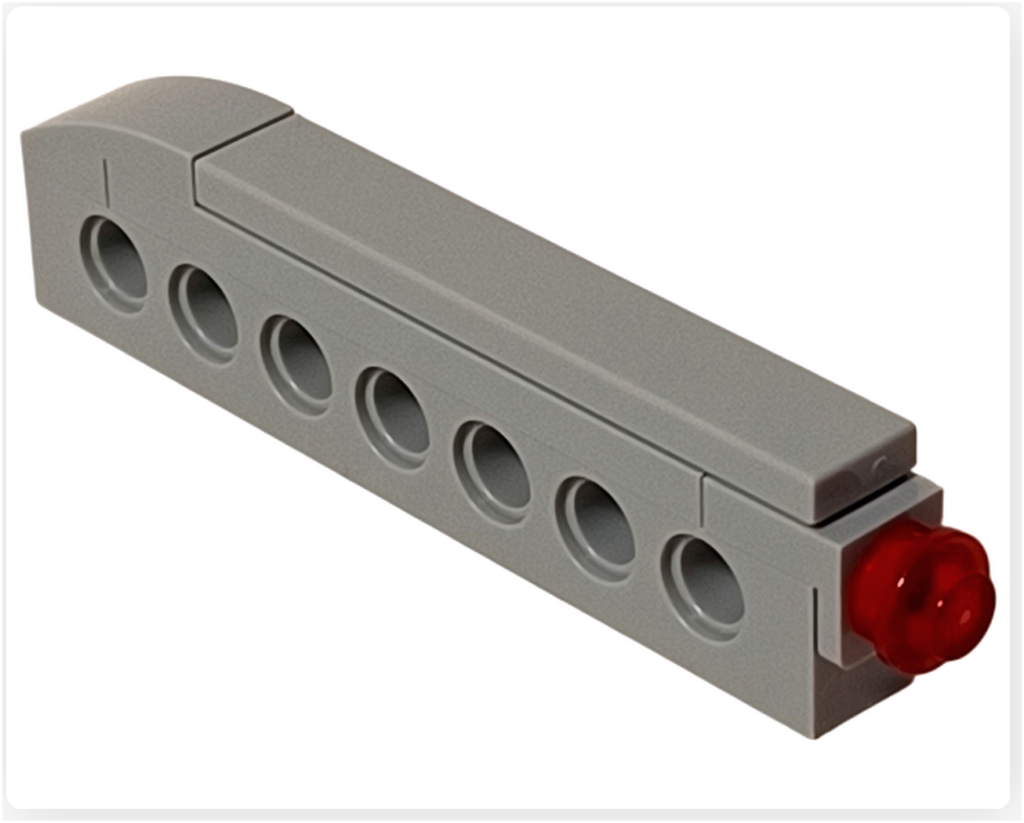
細長いテクニックパーツを中心に、土台となる構造を形成していく。
――ここが、全体の安定性を支える土台になる。
後の可動や安定性に関わる、重要なパーツとなる。

観測ユニットの脚部ユニットが、ここから形になり始める。

複数の接続軸を持つ構造で、各ユニットを受ける中心部となる。
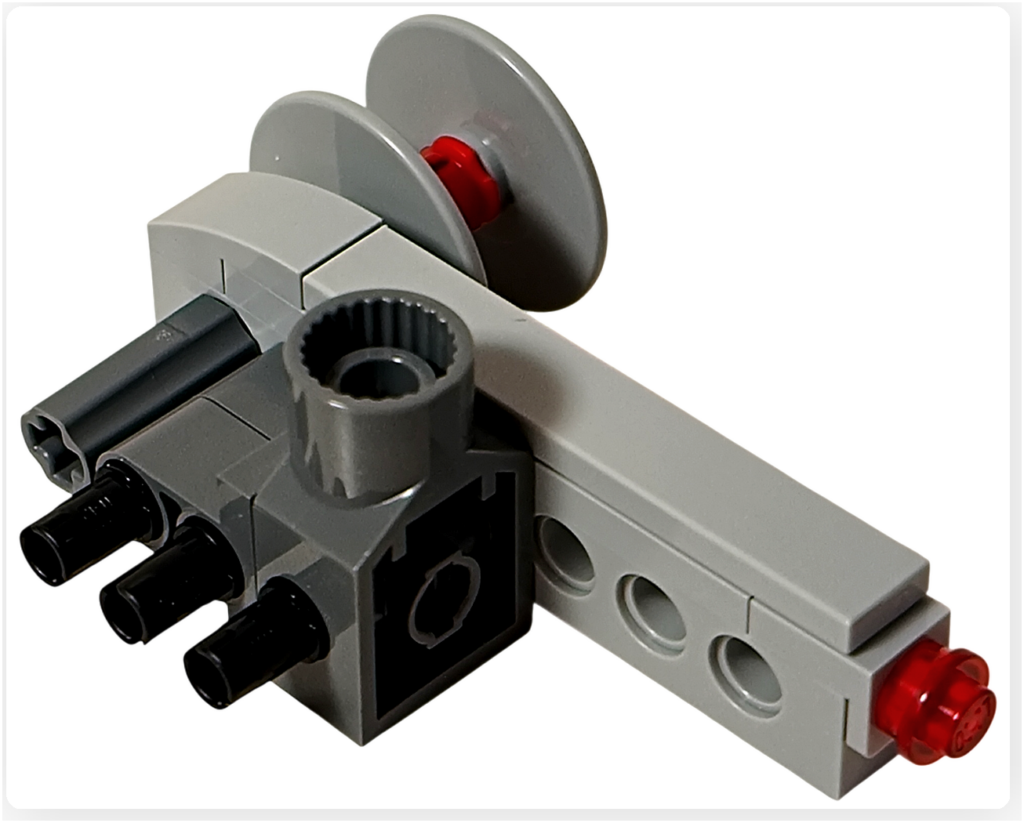
脚部ベースとしての輪郭が見え始める。
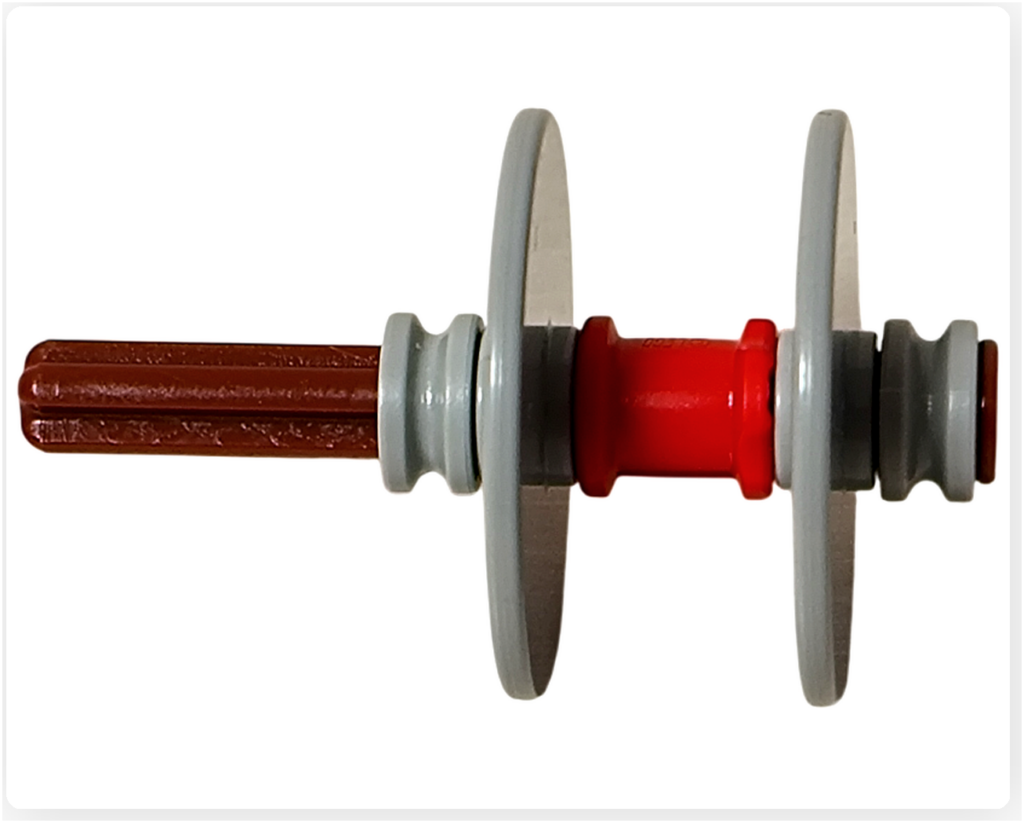
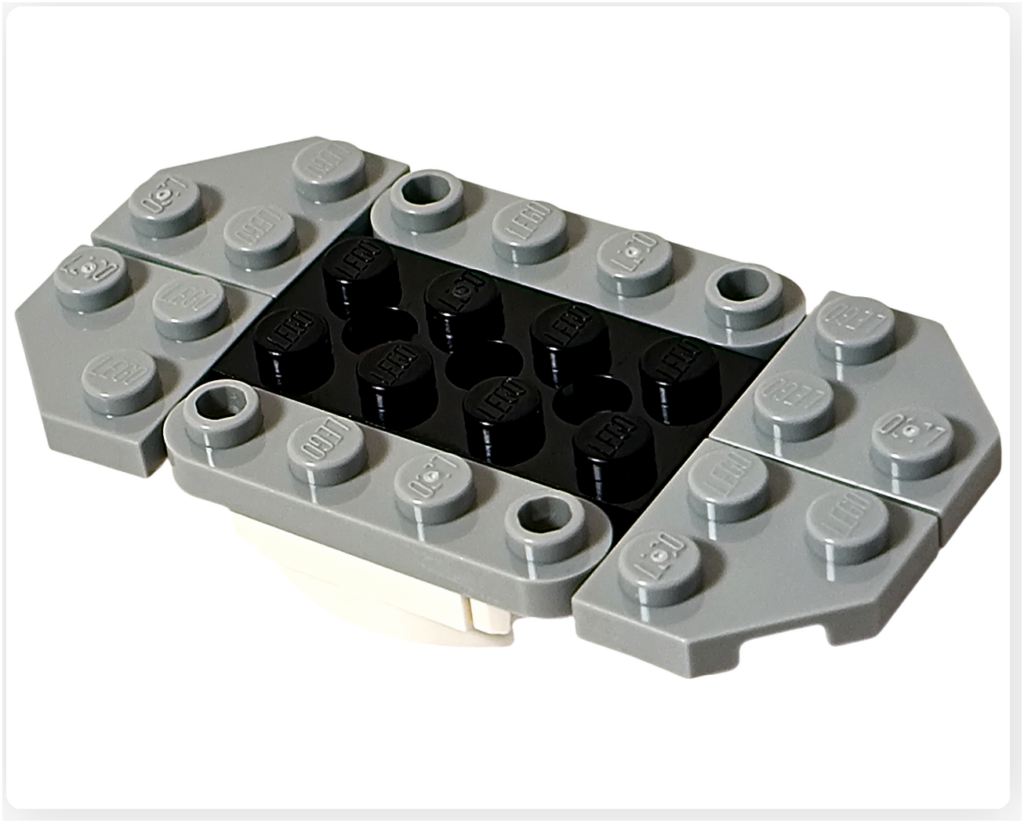
移動機構
移動機構の組み込みに向けた準備段階へ入る。

観測ユニットの脚部ベースが、実際に“動く構造”として機能し始める。
袋2パーツ
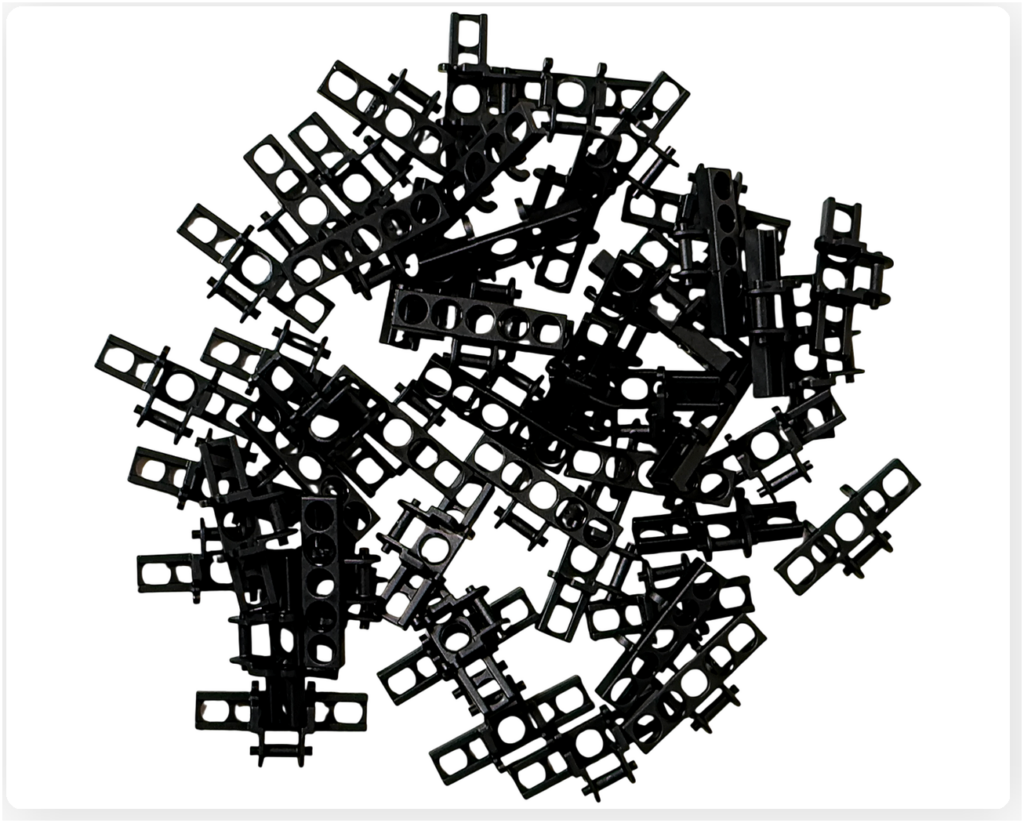
複数のリンクパーツを連結することで、履帯として機能する構造になっている。
履帯ユニット
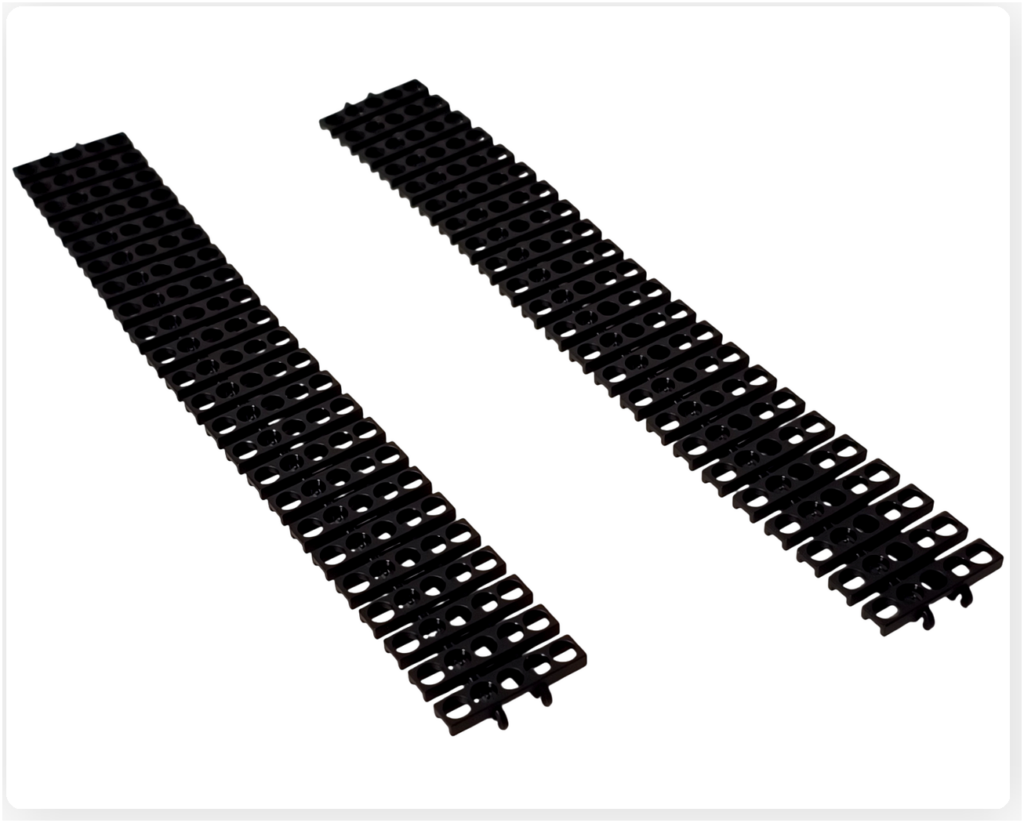
細かなリンク構造により、柔軟に曲がる仕組みになっている。
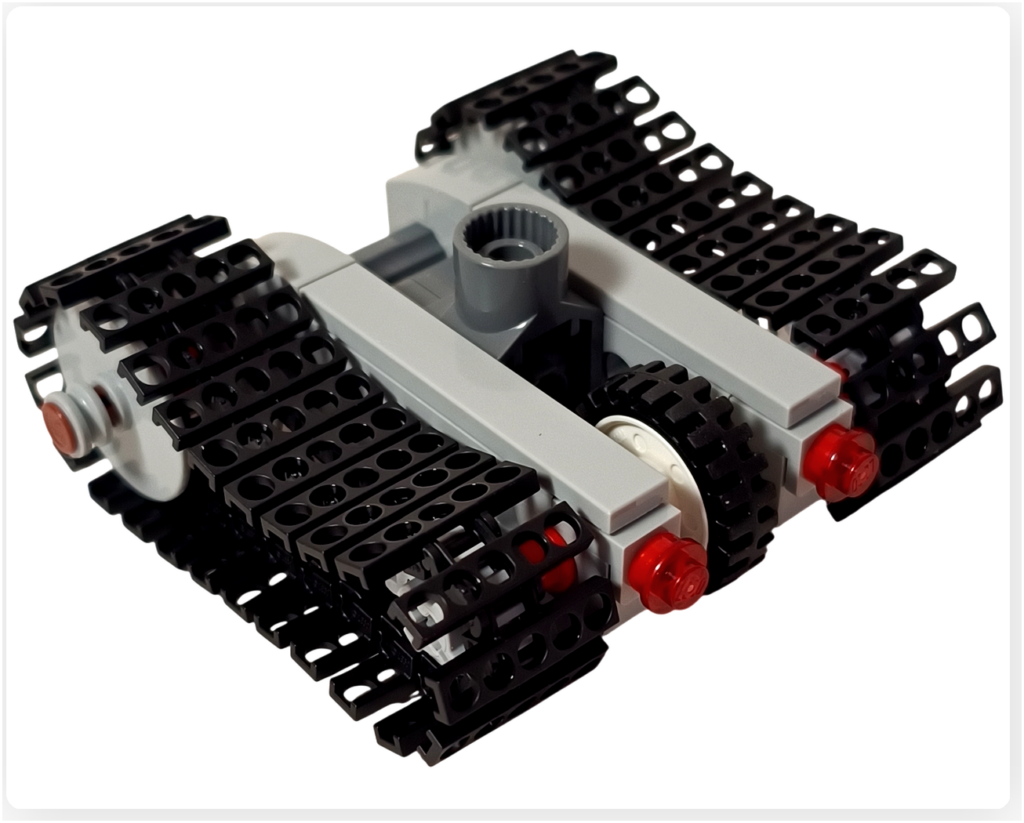
ユニット全体が一気に“移動するロボット”らしいシルエットへと変化する。
――観測ユニットは、この段階で自立移動が可能な状態に入る。
――脚部ユニット、構築完了。
観測ユニットは、自立移動可能な状態へ移行した。
🧩 第2章|胴体
――胴体ユニット、構築開始。
内部コアと外装フレームの接続工程へ移行する。
袋3パーツ

コア構築|ライトブロック

トランスオレンジのパーツが配置され、内部コアの発光表現が見えてくる。
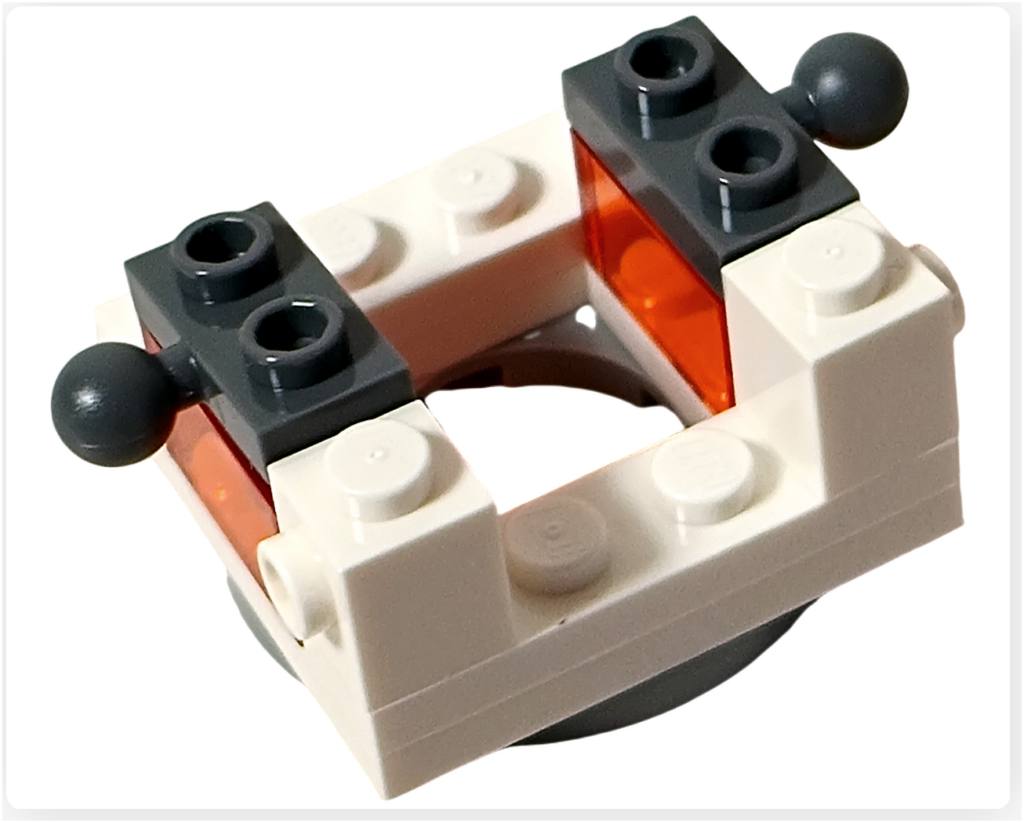
腕や上半身へつながる可動構造が、この段階で組み込まれていく。

内部にLEDが組み込まれており、完成後の発光ギミックを担う重要パーツ。

内部から広がる赤い光が、ロボットのエネルギーコアとしての存在感を一気に引き上げる。
――このユニットの“中心”が、ここで初めて可視化される。

この状態で胴体へ組み込む準備が整う。

外装と一体化することで、発光ギミックが内部構造として機能する。
――外装の中に、コアが収まる。
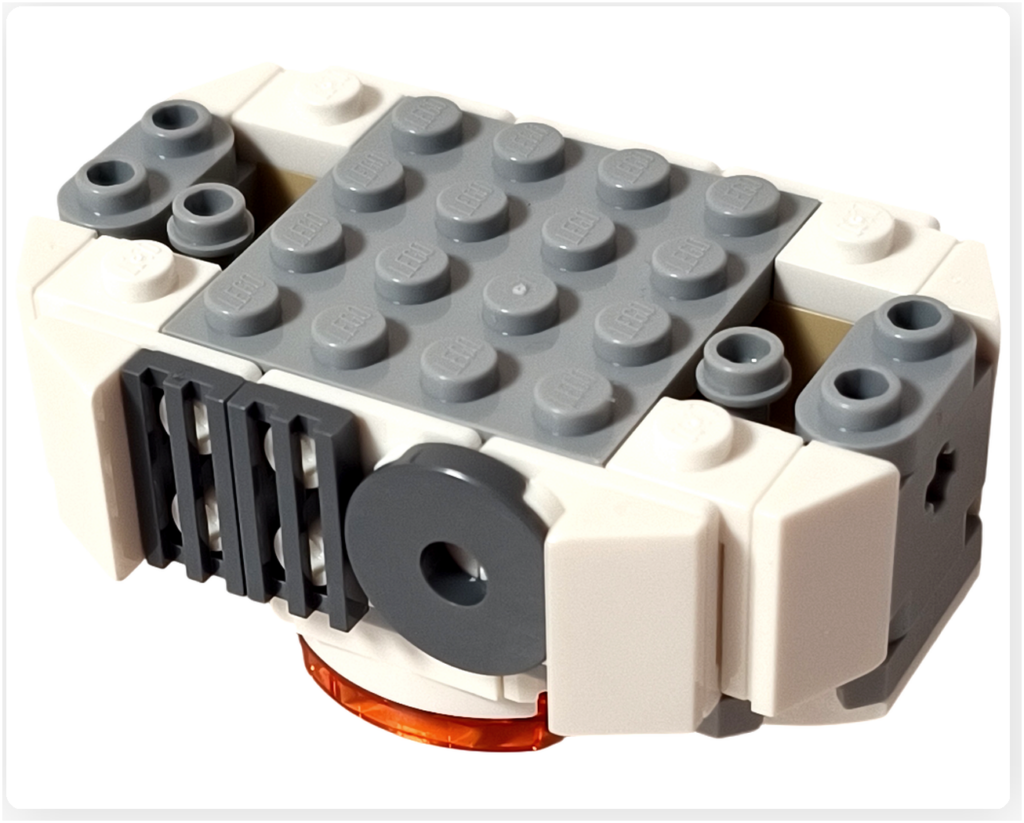
外装構築|胴体フレーム
ライトブロックや内部ギミックの配置が確認できる段階。
光を外へ導く構造が、この段階で明確になる。

内部の光を外へ見せる設計が、この段階で明確になる。

内部の発光ギミックを隠しつつ、窓から光を見せる構造に仕上がる。

透過オレンジとホワイトの組み合わせで、発光演出の下地が作られている。
内部のライトがリング状に見える構造になり、デザインとギミックが一体化する。
――機能と意匠が、この部分で完全に結びつく。
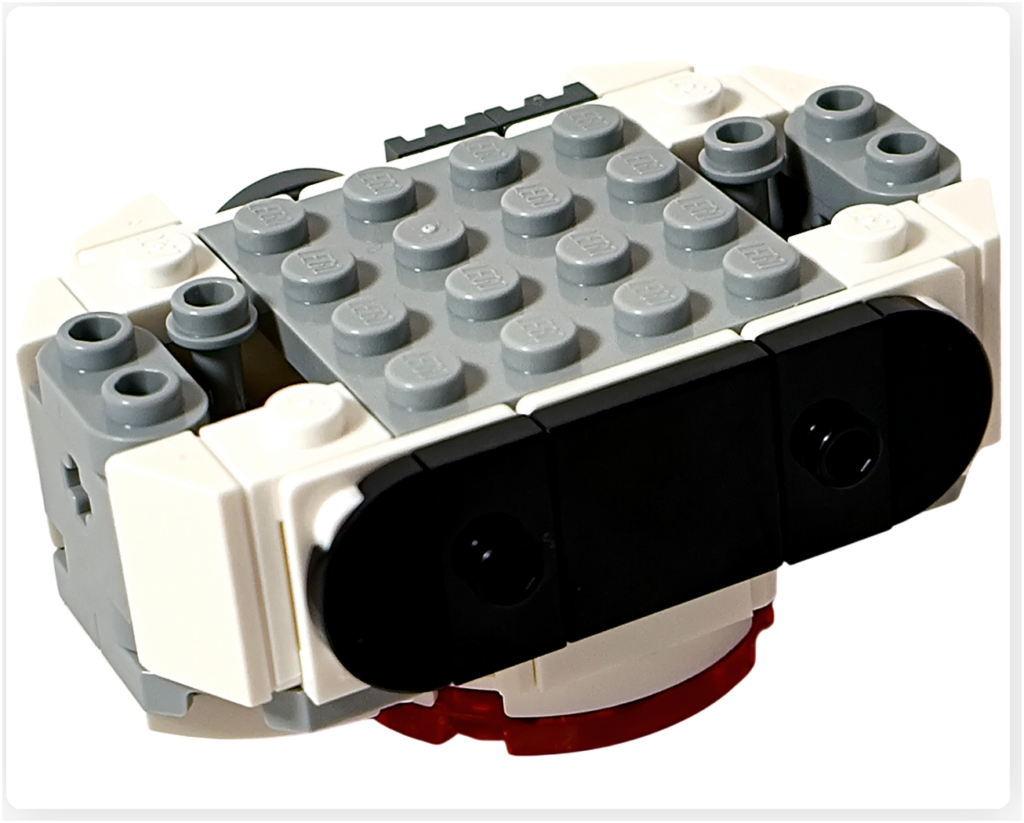
上半身完成|脚部連結

円形の発光ユニットが前面に並び、ロボットらしい印象が一気に強まる。
――ここで、ユニットとしての基本形が成立する。

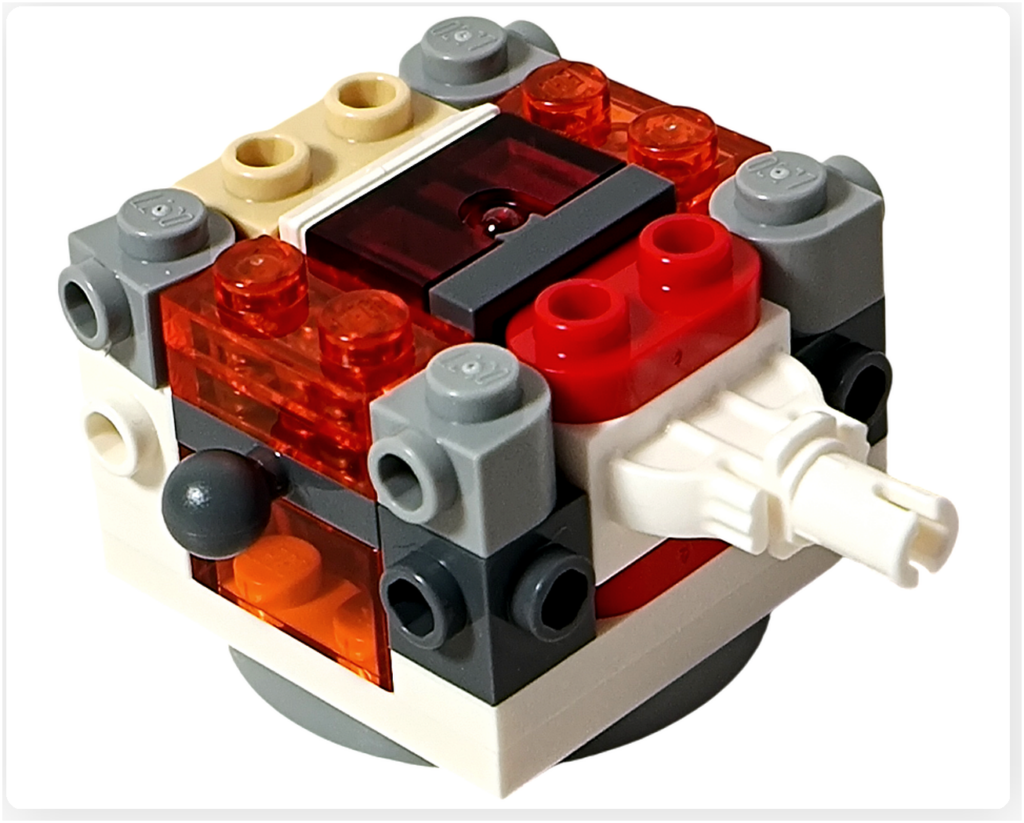
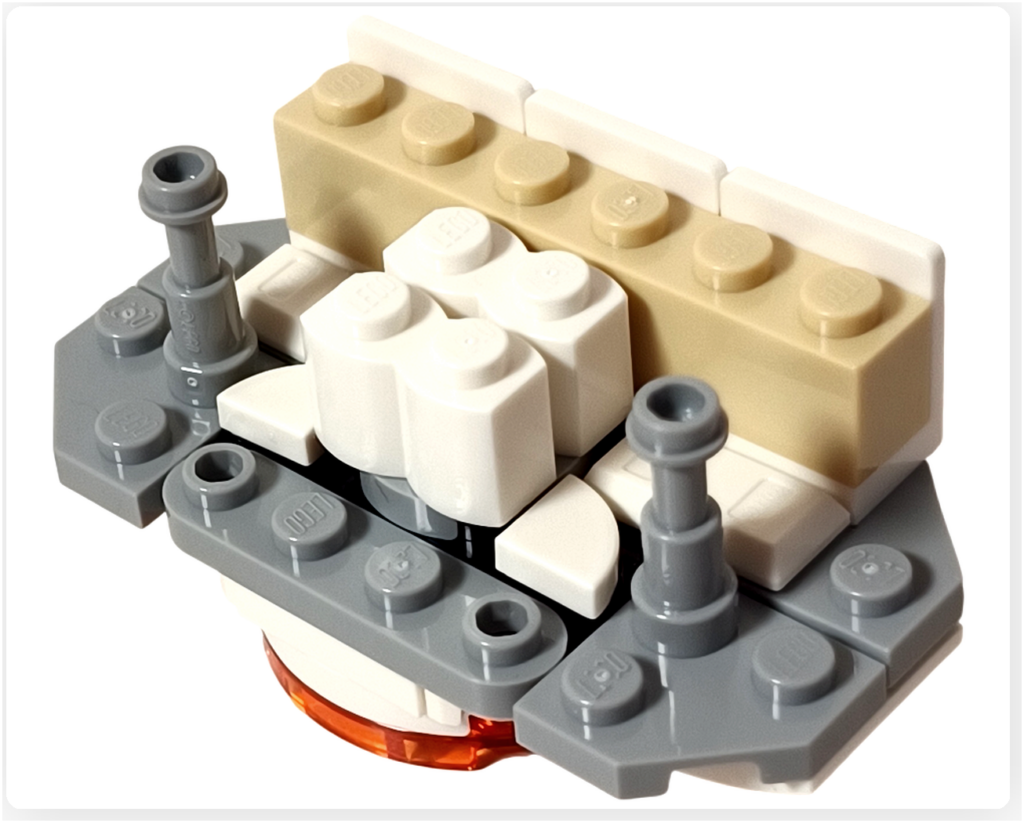
ギアやライトパーツが露出し、メカニカルな内部構造が感じられる仕上がり。

小型のスラスターやライトパーツが配置され、機能パーツらしい構造が見えてくる。

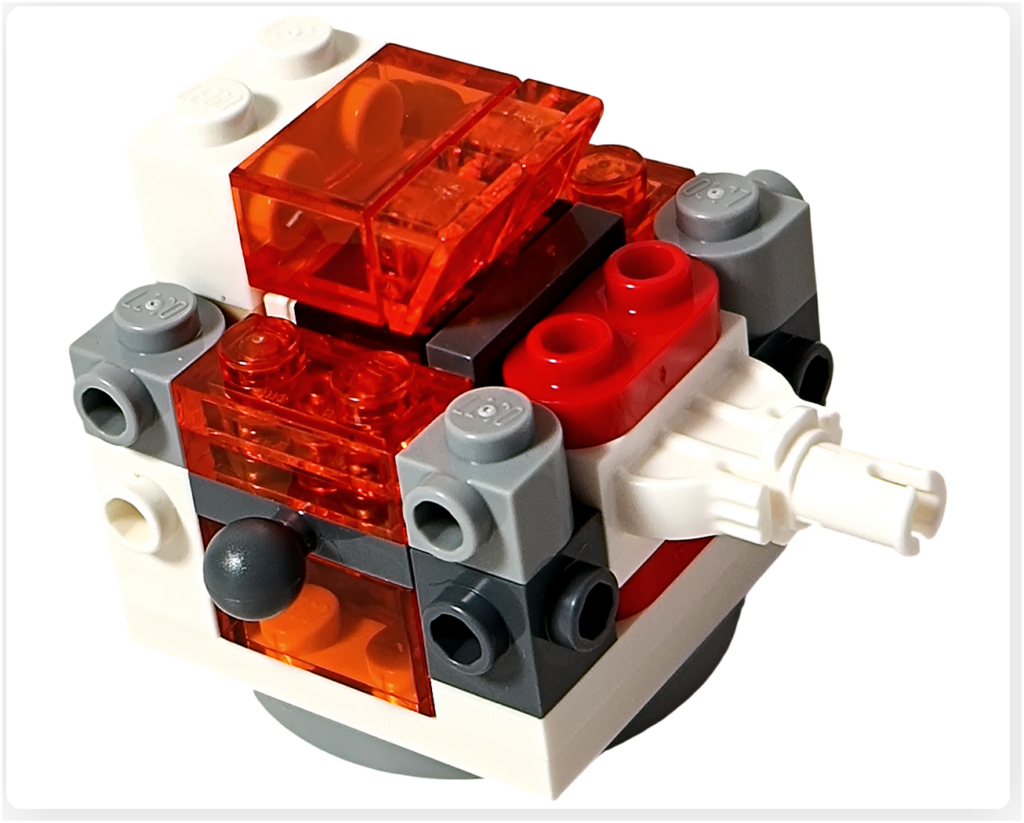
丸みのあるタンク形状と炎パーツにより、推進装置のようなデザインに仕上がっている。

後方にボリュームが加わり、宇宙機らしいシルエットと機能性が強調される。
――推進機構としての役割も、この段階で見えてくる。

関節とハンドパーツが組み合わさり、可動するロボットらしい構造が見えてくる。

左右に広がるアームによってシルエットが大きく変わり、一気にロボットらしい完成形に近づく。
――上半身ユニット、構造として成立。
――上半身ユニット、構築完了。
観測ユニットは、推進機構と作業機能を備えた状態へ到達した。
🧩 第3章|頭部
――頭部ユニット、構築開始。
観測ユニットの視認機構と最終外装を組み上げていく。
袋4パーツ

ホワイトの外装パーツに加え、ブルーやクリアパーツが多く、最終的な装飾やディテールアップに使われる構成。
頭部構築|センサーユニット
回転軸となるテクニックパーツを内蔵し、可動構造の土台が組み上がる。
グレーとブラックのパーツで、頭部の骨格と接続ポイントが整えられていく。

発光表現のアクセントとなるパーツで、ロボットの“目”や“センサー”のような印象を与える。
外装を取り付けるための接続ポイントが整い、立体感が一段と増してくる。
スリット状のパーツが加わることで、メカらしい精密な印象が強まる。
センサー部分の土台が整い、ロボットらしいフロントデザインが見えてくる。
大きなレンズ状の“目”が特徴的で、一気に愛嬌のあるロボットフェイスに仕上がる。
――このユニットの“表情”が、ここで初めて確定する。
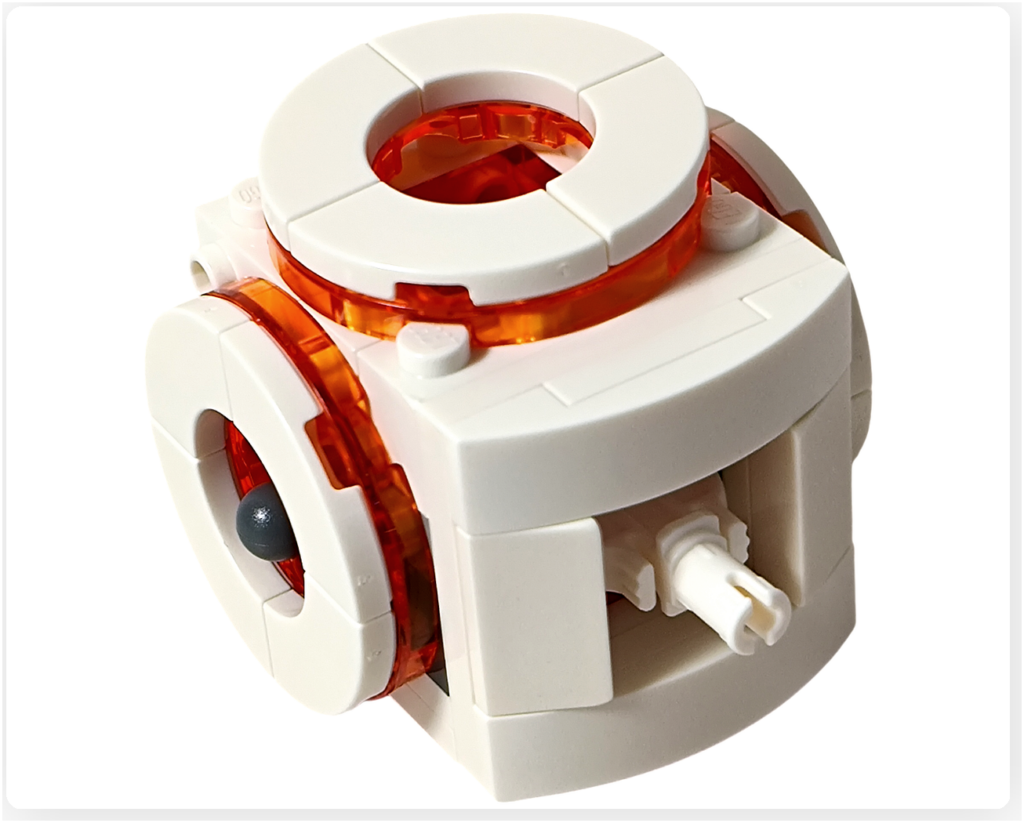
クリアオレンジのリングや円形パーツが配置され、シンプルながらもSFらしいディテールがしっかり作り込まれている。
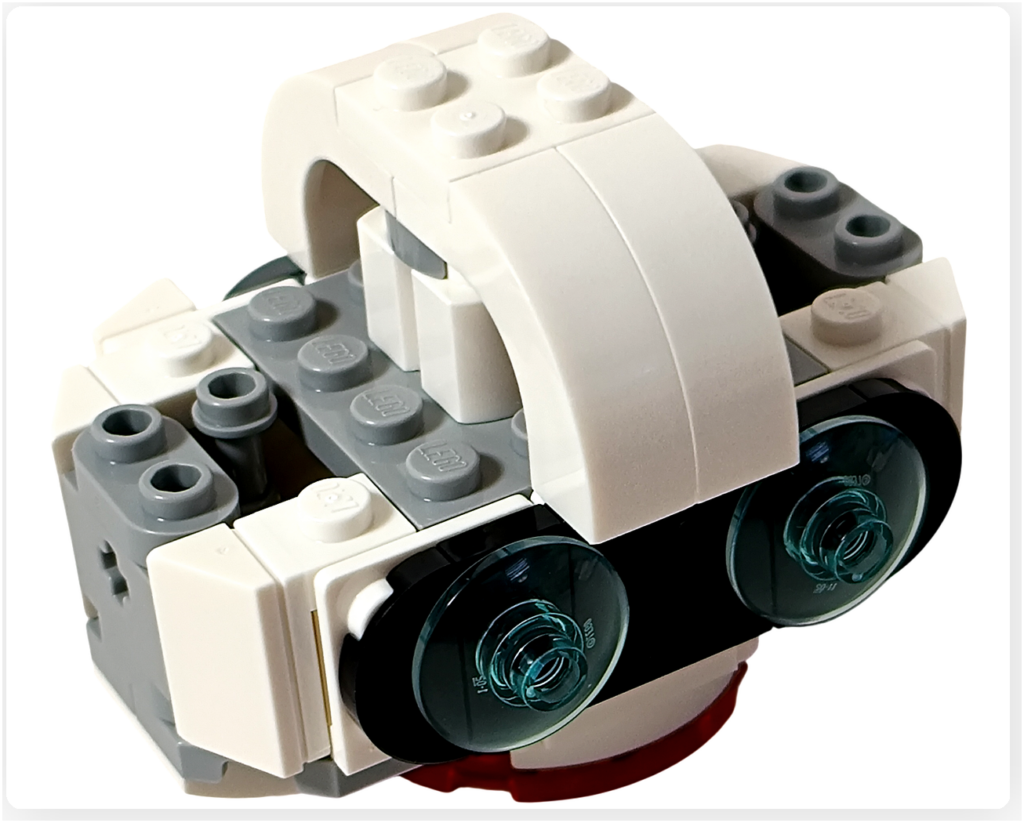
最終完成|全体シルエット

大きな頭部とキャタピラ式の足回り、細いアームのバランスがユニークで、愛嬌のある宇宙ロボットらしいシルエットに仕上がっている。
――ユニットとしての最終形が見えてくる。
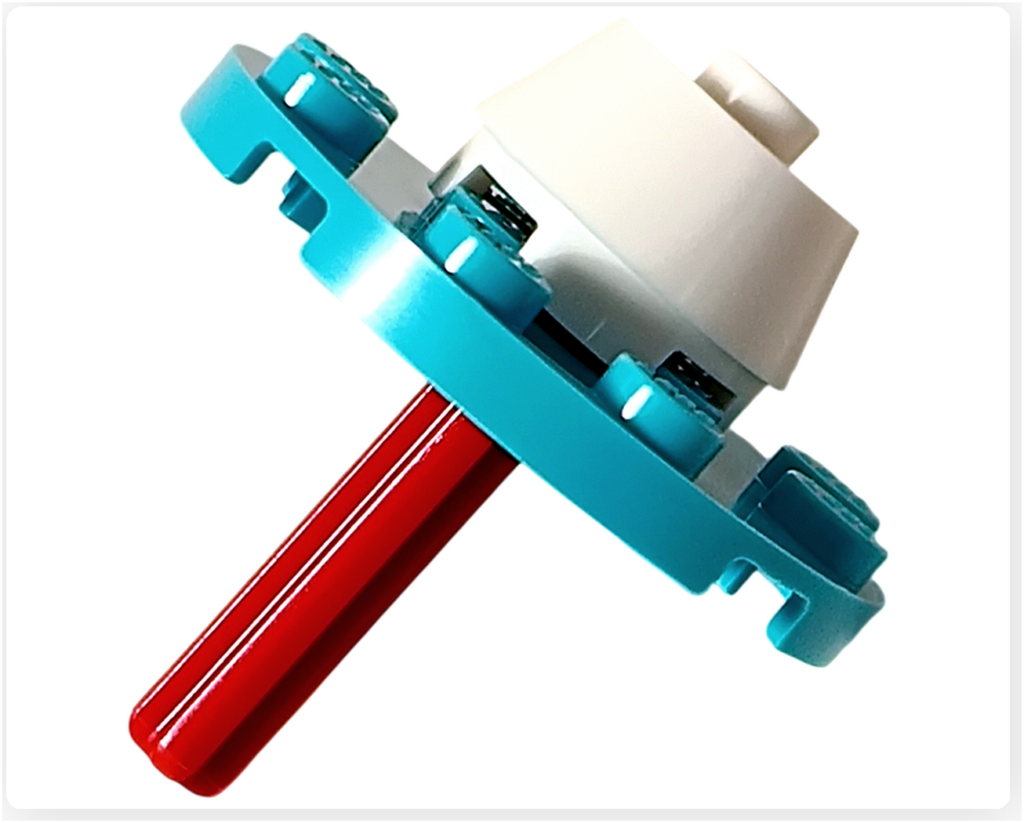
小さな構造ながら、回転や接続を意識したテクニックが使われている。

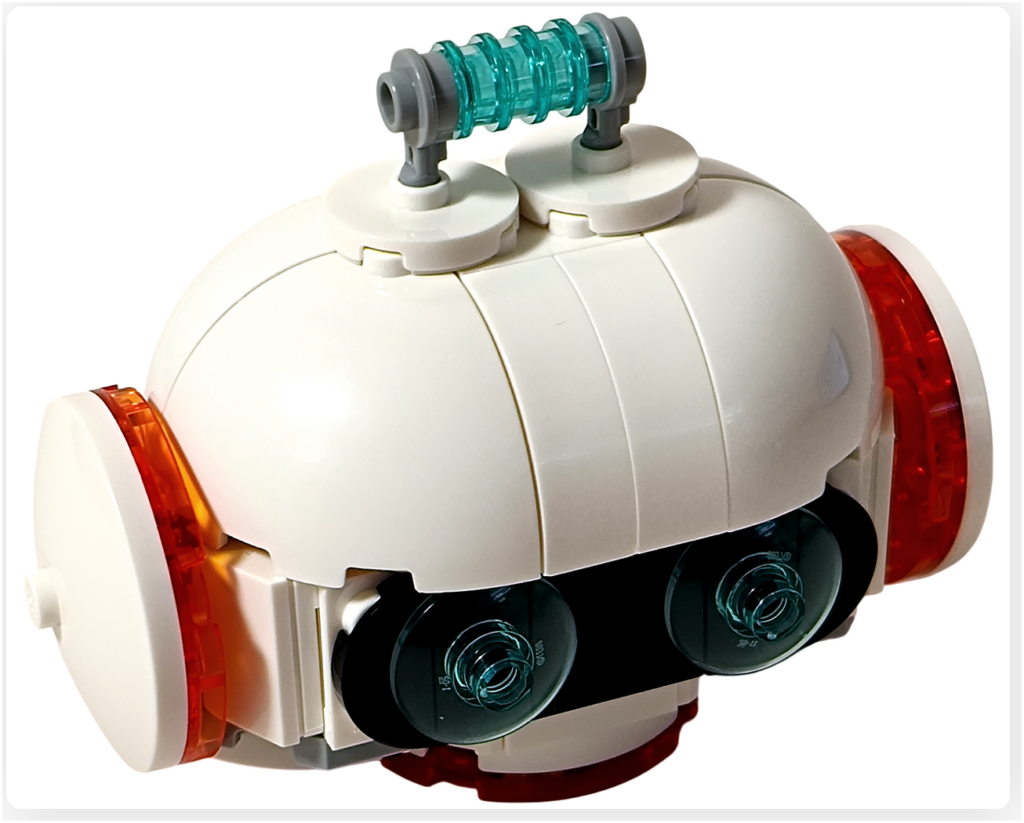
丸みのある外装パーツで、一気に風船らしいシルエットが見えてくる。

ポップなカラーと細い持ち手の対比が楽しく、ロボットに遊び心を加えるアクセサリーになっている。

丸みのある頭部とキャタピラの足回り、細いアームの組み合わせが特徴的で、かわいらしさとメカ感がバランスよくまとまっている。
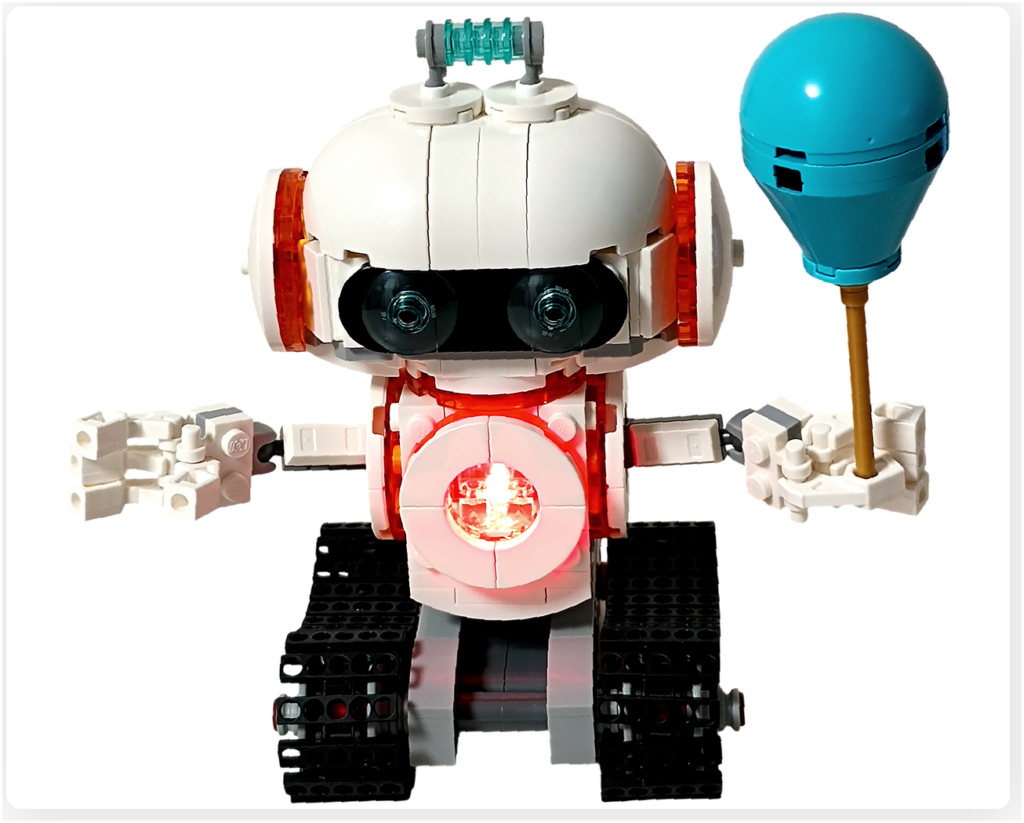
内部から赤く光る演出により、ロボットらしいエネルギーコア表現を完成させるギミックになっている。
余りパーツ

うちゅうロボットは余剰パーツが少なく、ほとんどのパーツを使い切る構成になっており、コンパクトながら無駄のない設計が感じられる。
――観測ユニット、構築完了。
内部コア・視認機構ともに正常動作を確認。
🧭 組立レビュー|おわりに
全ユニットの構築および接続工程を終了。
脚部による移動機構。
内部コアによる発光機構。
大型センサーを備えた観測用頭部。
それぞれが独立しながら、
ひとつの観測ユニットとして綺麗にまとまっている。
特に印象的だったのは、
“機械らしさ”と“愛嬌”の距離感。
キャタピラや発光コアを備えながら、
どこか静かで、親しみやすい。
観測機なのか。
補助ユニットなのか。
あるいは、ただ漂流していただけなのか。
……結局、その答えは最後までわからなかった。
でも、最初よりずっと“生き物っぽく”見えてきました!
頭部が付いた瞬間、一気に変わったわね。
あの“目”は反則だと思う
わかります!
急に“こっち見てる感”が増しました!
だからその“見てる感”って表現、便利に使いすぎなのよ
あと風船です!
あれで一気に危険度ゼロになりました!
ええ。
あの時点で“観測対象”から“ちょっと気になる子”くらいには降格したわね
降格なんですね……
少なくとも、撃ち合いになるタイプじゃなさそうだし。
それなら十分よ
・📜 総合案内(まとめ記事)はこちら

・🧱 組立レビュー 第2部|組立の記録を見る

・🧱 組立レビュー 第3部|組立の記録を見る

いっしょに遊んでみたくなったら、のぞいてみてね⚓️

